Tracing Luggage Carrier Robot Vehicle: Design and implement an accurate self-control robot system
DOI:
https://doi.org/10.29304/jqcsm.2026.18.22160Keywords:
Carrier robot, Arduino, Motion tracking, Servo motor, luggage carrier robotsAbstract
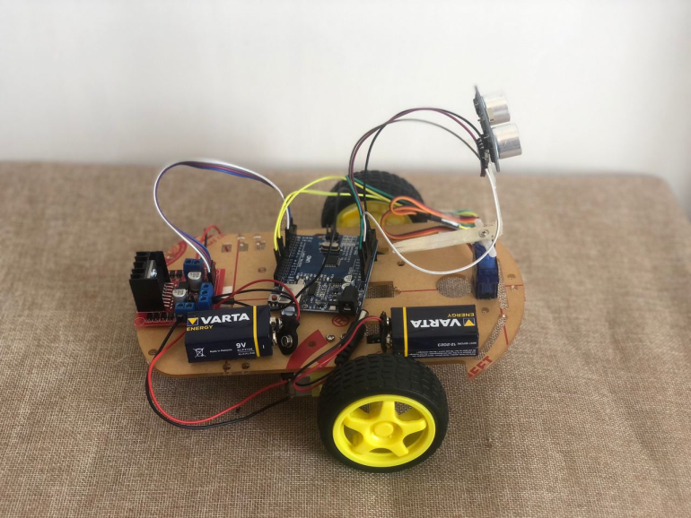
Nowadays, travelers have been faced with a common problem when carrying heavy luggage, especially when airports do not meet the passengers' needs to some extent. Thus, the need to reduce the luggage carried is one of the obstacles that the traveler faces due to the lack necessitated by the fact that the vehicles provided by the airports. Therefore, to overcome this issue, several luggage carrier robots have been developed to provide user convenience and automation, which significant advancement in introducing mobility. Carrying luggage, following users, and elimination, common challenges faced by travelers. Therefore, a self-controlled luggage carrier robot is proposed to provide enhanced mobility, follow the user, avoid obstacles, and carry luggage effectively. A tracing person algorithm-based self-control robot and an ultrasonic sensor (HC-SR04) based avoiding obstacle avoidance, respectively. The simulation results have shown that the proposed system achieved in effectively demonstrates its ability to switch between tracing, stop, and collision avoidance modes autonomously by achieving a Mean absolute error (MAE) of 3.88 cm in distance tracking. Besides, it provides accurate logical tracking under different loads which is best for light-to-medium luggage loads (4-5 kg approximately) to maintaining optimal walking of 0.36 m/s.
Downloads
References
Gubbi, J., Buyya, R., Marusic, S., & Palaniswami, M. (2013). Internet of Things (IoT): A vision, architectural elements, and future directions. Future generation computer systems, 29(7), 1645-1660.
Ali, Nabeel Salih, Hakim Adil Kadhim, and Dheyaa Mohammed Abdulsahib. "Multi-function intelligent robotic in metals detection applications." TELKOMNIKA (Telecommunication Computing Electronics and Control) 17.4 (2019): 2058-2069.
A. Qureshi, M. Restrepo, V. Rodriguez, N. Chawla, and S. Tosunoglu, “Remote Controlled Carry-on and Checked Luggage Carrier for High Loads,” 2017.
M. Charlemaine A. Abas and P. D. Cerna, “Design and Development of Microcontroller Remote Controlled Airport Luggage Cart,” Int. Trans. Electr. Comput. Eng. Syst., vol. 4, no. 2, pp. 49–54, 2017.
Gandole, Y. B. (2011). SIMILATION AND DATA PROCESSING IN ULTRASONIC MEASUREMENTS. Anadolu University of Sciences & Technology-A: Applied Sciences & Engineering, 12(2).
Badamasi, Y. A. (2014, September). The working principle of an Arduino. In 2014 11th international conference on electronics, computer and computation (ICECCO) (pp. 1-4). IEEE.
Latha, N. A., Murthy, B. R., & Kumar, K. B. (2016). Distance sensing with ultrasonic sensor and Arduino. International Journal of Advance Research, Ideas and Innovations in Technology, 2(5), 1-5.
Zhmud, V. A., Kondratiev, N. O., Kuznetsov, K. A., Trubin, V. G., & Dimitrov, L. V. (2018). Application of ultrasonic sensor for measuring distances in robotics. In Journal of Physics: Conference Series (Vol. 1015, No. 3, p. 032189).
Maung, M. M., Latt, M. M., & Nwe, C. M. (2018). DC Motor Angular Position Control using PID Controller with Friction Compensation. International Journal of Scientific and Research Publications, 8(11), 149.
Hu, J., Gao, X., Niu, J. C., & Zhang, X. M. (2025). Research on the design of posture adjustment structure and control system of carrying robot based on the bionic characteristics of pupae structure. Measurement, 242, 116240.
Chen, Y., Xu, Z., & Xu, Q. (2024). A multifunctional magnetic miniature truck robot for cargo loading and unloading. Cell Reports Physical Science, 5(7).
Chenhao, S., Yaoding, W., Xiangjun, Z., Wen, W., Chun, C., Yang, S., ... & Quan, Z. (2024). A hybrid spatiotemporal distribution forecast methodology for IES vulnerabilities under uncertain and imprecise space-air-ground monitoring data scenarios. Applied Energy, 373, 123805.
Das, S. K., Benkhelifa, F., Sun, Y., Abumarshoud, H., Abbasi, Q. H., Imran, M. A., & Mohjazi, L. (2023). Comprehensive review on ML-based RIS-enhanced IoT systems: basics, research progress and future challenges. Computer Networks, 224, 109581.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Hakim Adil Kadhim

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.