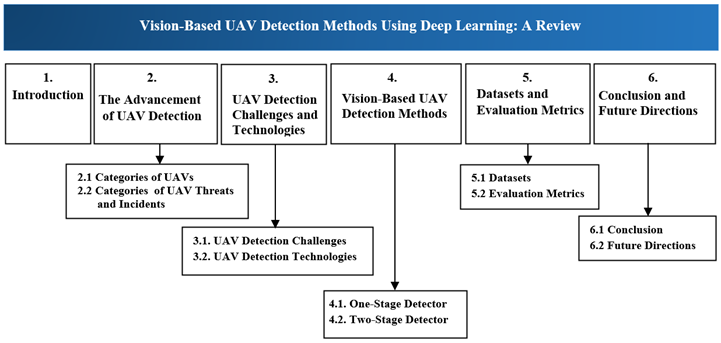
Vision-Based UAV Detection Methods Using Deep Learning: A Review
DOI:
https://doi.org/10.29304/jqcsm.2026.18.12504Keywords:
Drone Detection, UAV Detection,, UAV Datasets,, Deep Learning, Computer Vision.Abstract
Unmanned Aerial Vehicles (UAVs), or drones are increasingly used for civilian and military purposes. But their misuse raises serious concerns related to privacy, safety and security making them double-edged weapons. Consequently, there is an urgent need for effective UAV detection systems to mitigate threats posed by unauthorized UAV operations over restricted territories. With rapid advances in deep learning and computer vision, vision-based UAV detection systems have achieved notable progress. However, the existing reviews often lack systematic algorithmic analysis and clear summarization of trends and limitations. Therefore, this review aims to consolidate and summarize recent vision-based UAV detection methods using deep learning, focusing on convolutional neural network (CNN)-based models and to provide actionable directions for future research. Firstly, this study presents the evolution of UAV detection, key challenges and the pros and cons of the technologies used. Next it presents a summary of the recent advances in UAV detection methods utilizing one- or two-stage detectors only; the literature shows a strong dominance of YOLO-based architectures due to their favorable accuracy–speed trade-off and suitability for real-time deployment. It further summarizes commonly reported evaluation metrics (e.g., precision, recall and F1-score). Finally, it systematically reviews public UAV datasets and their characteristics highlighting persistent dataset limitations, including limited diversity in altitude, weather, illumination and environment which contributes to a comprehensive understanding of their characteristics and applicability.
Downloads
References
A. Bertolini, “Artificial Intelligence and civil law: liability rules for drones,” European Parliament Think Tank, Study IPOL_STU(2018)608848, May 2018. [Online]. Available:
https://www.europarl.europa.eu/thinktank/en/document/IPOL_STU(2018)608848. [Accessed: Sep. 28, 2025].
O. D. H. Hani and A. A. Abdulhameed, "Drone network and the cyber attacks: A survey study," in AIP Conference Proceedings, vol. 3264, no. 1, p. 020012, Mar. 2025, AIP Publishing LLC. doi: https://doi.org/10.1063/5.0258870.
U.S. Government Accountability Office, “Drones: Actions Needed to Better Support Remote Identification in the National Airspace,” GAO-24-106158, Jun. 6, 2024. [Online]. Available: https://www.gao.gov/products/gao-24-106158. [Accessed: Sep. 29, 2025].
Z.-Q. Zhao, P. Zheng, S.-T. Xu, and X. Wu, “Object Detection With Deep Learning: A Review,” IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 11, pp. 3212–3232, Nov. 2019, doi: https://doi.org/10.1109/tnnls.2018.2876865.
A. Sharba and H. Kanaan, “Improving Tiny Object Detection in Aerial Images with Yolov5,” Journal of Engineering and Sustainable Development, vol. 29, no. 1, pp. 57–67, Jan. 2025, doi: https://doi.org/10.31272/jeasd.2682 .
J. Cheng, H. Li, D. Li, S. Hua, and V. S. Sheng, “A Survey on Image Semantic Segmentation Using Deep Learning Techniques,” Computers, Materials & Continua, vol. 74, no. 1, pp. 1941–1957, 2023, doi: https://doi.org/10.32604/cmc.2023.032757.
L. Khrissi, N. El Akkad, H. Satori, and K. Satori, “Clustering method and sine cosine algorithm for image segmentation,” Evolutionary Intelligence, Jan. 2021, doi: https://doi.org/10.1007/s12065-020-00544-z.
A. A. Maryoosh and Saeid Pashazadeh, “Leukemia Detection Using Machine Learning Algorithms: Current Trends and Future Directions (Literature Survey),” Mustansiriyah Journal of Pure and Applied Sciences, vol. 2, no. 3, pp. 33–49, Jul. 2024, doi: https://doi.org/10.47831/mjpas.v2i3.76 .
Alaa Hussein Abdulaal et al., “Hybrid CNN and RNN Model for Histopathological Sub-Image Classification in Breast Cancer Analysis Using Self-Learning,” Journal of Engineering and Sustainable Development, vol. 29, no. 3, pp. 310–320, May 2025, doi: https://doi.org/10.31272/jeasd.2746 .
S. Srivastava, S. Narayan, and S. Mittal, “A survey of deep learning techniques for vehicle detection from UAV images,” Journal of Systems Architecture, vol. 117, p. 102152, Aug. 2021, doi: https://doi.org/10.1016/j.sysarc.2021.102152.
Y. Diez, S. Kentsch, M. Fukuda, M. L. L. Caceres, K. Moritake, and M. Cabezas, “Deep Learning in Forestry Using UAV-Acquired RGB Data: A Practical Review,” Remote Sensing, vol. 13, no. 14, p. 2837, Jul. 2021, doi: https://doi.org/10.3390/rs13142837.
T. B. Shahi, C.-Y. Xu, A. Neupane, and W. Guo, “Recent Advances in Crop Disease Detection Using UAV and Deep Learning Techniques,” Remote Sensing, vol. 15, no. 9, p. 2450, Jan. 2023, doi: https://doi.org/10.3390/rs15092450.
P. Tang, J. Li, and H. Sun, “A Review of Electric UAV Visual Detection and Navigation Technologies for Emergency Rescue Missions,” Sustainability, vol. 16, no. 5, pp. 2105–2105, Mar. 2024, doi: https://doi.org/10.3390/su16052105.
P. Mittal, R. Singh, and A. Sharma, “Deep learning-based object detection in low-altitude UAV datasets: A survey,” Image and Vision Computing, vol. 104, p. 104046, Dec. 2020, doi: https://doi.org/10.1016/j.imavis.2020.104046.
S. Park, H. T. Kim, S. Lee, H. Joo, and H. Kim, “Survey on Anti-Drone Systems: Components, Designs, and Challenges,” IEEE Access, vol. 9, pp. 42635–42659, 2021, doi: https://doi.org/10.1109/access.2021.3065926.
M. A. Khan, H. Menouar, A. Eldeeb, A. Abu-Dayya, and F. D. Salim, “On the Detection of Unauthorized Drones—Techniques and Future Perspectives: A Review,” IEEE Sensors Journal, vol. 22, no. 12, pp. 11439–11455, Jun. 2022, doi: https://doi.org/10.1109/JSEN.2022.3171293.
X. Yan et al., “UAV Detection and Tracking in Urban Environments Using Passive Sensors: A Survey,” Applied Sciences, vol. 13, no. 20, p. 11320, Jan. 2023, doi: https://doi.org/10.3390/app132011320.
Nader Al-lQubaydhi et al., “Deep learning for unmanned aerial vehicles detection: A review,” Computer science review, vol. 51, pp. 100614–100614, Feb. 2024, doi: https://doi.org/10.1016/j.cosrev.2023.100614.
M. H. Rahman, M. A. S. Sejan, M. A. Aziz, R. Tabassum, J. I. Baik, and H. K. Song, “A Comprehensive Survey of Unmanned Aerial Vehicles Detection and Classification Using Machine Learning Approach: Challenges, Solutions, and Future Directions,” Remote sensing (Basel), vol. 16, no. 5, pp. 879–879, Mar. 2024, doi: https://doi.org/10.3390/rs16050879.
A. A. Laghari, A. K. Jumani, R. A. Laghari, H. Li, S. Karim, and A. A. Khan, "Unmanned aerial vehicles advances in object detection and communication security review," Cognitive Robotics, vol. 4, pp. 128–141, Aug. 2024, doi: https://doi.org/10.1016/j.cogr.2024.07.002.
Safaa Dafrallah and M. A. Akhloufi, “Malicious UAV detection using various modalities,” Drone systems and applications, Mar. 2024, doi: https://doi.org/10.1139/dsa-2023-0049 .
J. Moore, “Counter drone tactics: Which drones are a real threat, and which aren’t?,” IFSEC Global, Feb. 2021. [Online]. Available: https://www.ifsecglobal.com/drones/counter-drone-tactics-which-drones-are-a-real-threat-and-which-arent/. [Accessed: Oct. 5, 2025].
N. Ali, “Unexploded drone found near Duhok dam,” Rudaw, Apr. 10, 2023. [Online]. Available: https://www.rudaw.net/english/kurdistan/100420231. [Accessed: Oct. 5, 2025].
A. Greenstein, “Five arrested for using drones to smuggle contraband into federal prison,” Louisiana Radio Network, Jan. 27, 2025. [Online]. Available: https://louisianaradionetwork.com/2025/01/27/five-arrested-for-using-drones-to-smuggle-contraband-into-federal-prison/. [Accessed: Oct. 6, 2025].
Shafaq News, “Drone crashes near security facility in Baghdad,” Shafaq News, Mar. 12, 2025. [Online]. Available: https://shafaq.com/en/Iraq/Drone-crashes-near-security-facility-in-Baghdad [Accessed: Oct. 6, 2025].
D. Toogood, “Crashed drone seized after failed prison smuggling attempt,” Island Echo, Jan. 15, 2025. [Online]. Available: https://www.islandecho.co.uk/drone-crashed-and-seized-after-failed-prison-smuggling-attempt/. [Accessed: Oct. 6, 2025].
F.-L. Chiper, A. Martian, C. Vladeanu, I. Marghescu, R. Craciunescu, and O. Fratu, “Drone detection and defense systems: Survey and a software-defined radio-based solution,” Sensors, vol. 22, no. 4, p. 1453, Feb. 2022, doi: https://doi.org/10.3390/s22041453.
S. A. H. Mohsan, N. Q. H. Othman, Y. Li, M. H. Alsharif, and M. A. Khan, “Unmanned aerial vehicles (UAVs): Practical aspects, applications, open challenges, security issues, and future trends,” Intelligent Service Robotics, vol. 16, no. 1, pp. 1–21, Jan. 2023, doi: https://doi.org/10.1007/s11370-022-00452-4.
U. Seidaliyeva, D. Akhmetov, L. Ilipbayeva, and E. T. Matson, “Real-time and accurate drone detection in a video with a static background,” Sensors, vol. 20, no. 14, p. 3856, Jul. 2020, doi: https://doi.org/10.3390/s20143856.
J. Dai, L. Wu, and P. Wang, “Overview of UAV Target Detection Algorithms Based on Deep Learning,” 2021 IEEE 2nd International Conference on Information Technology, Big Data and Artificial Intelligence (ICIBA), pp. 736–745, Dec. 2021, doi: https://doi.org/10.1109/iciba52610.2021.9688305 .
A. Krizhevsky, I. Sutskever, and G. E. Hinton, “ImageNet classification with deep convolutional neural networks,” Commun. ACM, vol. 60, no. 6, pp. 84–90, Jun. 2017, https://doi.org/10.1145/3065386 .
R. Girshick, J. Donahue, T. Darrell, and J. Malik, “Rich feature hierarchies for accurate object detection and semantic segmentation,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), 2014, pp. 580–587. doi: https://doi.org/10.1109/CVPR.2014.81.
S. Ren, K. He, R. Girshick, and J. Sun, “Faster R-CNN: Towards real-time object detection with region proposal networks,” IEEE Trans. Pattern Anal. Mach. Intell., vol. 39, no. 6, pp. 1137–1149, Jun. 2017. doi: https://doi.org/10.1109/TPAMI.2016.2577031.
K. He, G. Gkioxari, P. Dollár, and R. Girshick, “Mask R-CNN,” in Proc. IEEE Int. Conf. Comput. Vis. (ICCV), Oct. 2017, pp. 2980–2988. doi: https://doi.org/10.1109/ICCV.2017.322.
X. Lu, B. Li, Y. Yue, Q. Li, and J. Yan, “Grid R-CNN,” in Proc. IEEE/CVF Conf. Comput. Vis. Pattern Recognit. (CVPR), Jun. 2019, pp. 7363–7372. doi: https://doi.org/10.1109/CVPR.2019.00754.
J. Redmon, S. Divvala, R. Girshick, and A. Farhadi, “You Only Look Once: Unified, Real-Time Object Detection,” in Proc. IEEE Conf. Comput. Vis. Pattern Recognit. (CVPR), Jun. 2016, pp. 779–788. doi: https://doi.org/10.1109/CVPR.2016.91.
W. Liu, D. Anguelov, D. Erhan, C. Szegedy, S. Reed, C.-Y. Fu, and A. C. Berg, “SSD: Single Shot MultiBox Detector,” in Proc. Eur. Conf. Comput. Vis. (ECCV), Sep. 2016, pp. 21–37. doi: https://doi.org/10.1007/978-3-319-46448-0_2.
T.-Y. Lin, P. Goyal, R. Girshick, K. He, and P. Dollar, “Focal loss for dense object detection,” IEEE Transactions on Pattern Analysis and Machine Intelligence, pp. 1–1, 2018, doi: https://doi.org/10.1109/tpami.2018.2858826.
A. Vaswani, N. Shazeer, N. Parmar, J. Uszkoreit, L. Jones, A. N. Gomez, Ł. Kaiser, and I. Polosukhin, “Attention Is All You Need,” arXiv preprint arXiv:1706.03762, Jun. 2017, doi: 10.48550/arXiv.1706.03762 .
N. Carion, F. Massa, G. Synnaeve, N. Usunier, A. Kirillov, and S. Zagoruyko, “End-to-End Object Detection with Transformers,” in Computer Vision – ECCV 2020, A. Vedaldi, H. Bischof, T. Brox, and J.-M. Frahm, Eds., Lecture Notes in Computer Science, vol. 12346. Cham, Switzerland: Springer, 2020, pp. 213–229, doi: 10.1007/978-3-030-58452-8_13 .
A. Dosovitskiy, L. Beyer, A. Kolesnikov, D. Weissenborn, X. Zhai, T. Unterthiner, M. Dehghani, M. Minderer, G. Heigold, S. Gelly, J. Usunier, and N. Houlsby, “An Image Is Worth 16x16 Words: Transformers for Image Recognition at Scale,” *arXiv preprint* arXiv:2010.11929, 2020, doi: 10.48550/arXiv.2010.11929.
Q. Shi and J. Li, “Objects Detection of UAV for Anti-UAV Based on YOLOv4,” 2020 IEEE 2nd International Conference on Civil Aviation Safety and Information Technology (ICCASIT, pp. 1048–1052, Oct. 2020, doi: https://doi.org/10.1109/iccasit50869.2020.9368788.
H. Liu, K. Fan, Q. Ouyang, and N. Li, “Real-Time Small Drones Detection Based on Pruned YOLOv4,” Sensors, vol. 21, no. 10, p. 3374, May 2021, doi: https://doi.org/10.3390/s21103374.
F. Samadzadegan, F. Dadrass Javan, F. Ashtari Mahini, and M. Gholamshahi, “Detection and Recognition of Drones Based on a Deep Convolutional Neural Network Using Visible Imagery,” Aerospace, vol. 9, no. 1, p. 31, Jan. 2022, doi: https://doi.org/10.3390/aerospace9010031 .
Y. Lv, Z. Ai, M. Chen, X. Gong, Y. Wang, and Z. Lu, “High-Resolution Drone Detection Based on Background Difference and SAG-YOLOv5s,” Sensors, vol. 22, no. 15, p. 5825, Aug. 2022, doi: https://doi.org/10.3390/s22155825.
A. Coluccia et al., “Drone vs. Bird Detection: Deep Learning Algorithms and Results from a Grand Challenge,” Sensors, vol. 21, no. 8, p. 2824, Jan. 2021, doi: https://doi.org/10.3390/s21082824 .
X. Zhai, Z. Huang, T. Li, H. Liu, and S. Wang, “YOLO-Drone: An Optimized YOLOv8 Network for Tiny UAV Object Detection,” Electronics, vol. 12, no. 17, p. 3664, Jan. 2023, doi: https://doi.org/10.3390/electronics12173664 .
H. Sun, J. Yang, J. Shen, D. Liang, L. Ning-Zhong, and H. Zhou, “TIB-Net: Drone Detection Network With Tiny Iterative Backbone,” IEEE Access, vol. 8, pp. 130697–130707, 2020, doi: https://doi.org/10.1109/access.2020.3009518.
C. Wang et al., “A Lightweight Uav Swarm Detection Method Integrated Attention Mechanism,” Drones (Basel), vol. 7, no. 1, pp. 13–13, Dec. 2023, doi: https://doi.org/10.3390/drones7010013 .
C. Wang, Y. Su, J. Wang, T. Wang, and Q. Gao, “UAVSwarm Dataset: An Unmanned Aerial Vehicle Swarm Dataset for Multiple Object Tracking,” Remote Sensing, vol. 14, no. 11, p. 2601, May 2022, doi: https://doi.org/10.3390/rs14112601 .
J. Liu, L. Plotegher, E. Roura, J. Cristino, and S. He, “Real-Time Detection for Small UAVs: Combining YOLO and Multi-frame Motion Analysis,” arXiv.org, 2024. https://arxiv.org/abs/2411.02582 .
A. Coluccia, Alessio Fascista, L. Sommer, A. Schumann, A. Dimou, and Dimitrios Zarpalas, “The Drone-vs-Bird Detection Grand Challenge at ICASSP 2023: A Review of Methods and Results,” IEEE Open Journal of Signal Processing, vol. 5, pp. 766–779, Jan. 2024, doi: https://doi.org/10.1109/ojsp.2024.3379073 .
M. Huang, W. Mi, and Y. Wang, “EDGS-YOLOv8: An Improved YOLOv8 Lightweight UAV Detection Model,” Drones, vol. 8, no. 7, p. 337, Jul. 2024, doi: https://doi.org/10.3390/drones8070337 .
J. Zhao, J. Zhang, D. Li, and D. Wang, “Vision-Based Anti-UAV Detection and Tracking,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 25323–25334, May 2022, doi: https://doi.org/10.1109/tits.2022.3177627 .
Y. Zheng, Z. Chen, D. Lv, Z. Li, Z. Lan, and S. Zhao, “Air-to-Air Visual Detection of Micro-UAVs: An Experimental Evaluation of Deep Learning,” IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1020–1027, Apr. 2021, doi: https://doi.org/10.1109/lra.2021.3056059 .
Y. Gao, Y. Xin, H. Yang, and Y. Wang, “A Lightweight Anti-Unmanned Aerial Vehicle Detection Method Based on Improved YOLOv11,” Drones, vol. 9, no. 1, p. 11, Dec. 2024, doi: https://doi.org/10.3390/drones9010011 .
H. Hao et al., “A High Performance Air-to-Air Unmanned Aerial Vehicle Target Detection Model,” Drones, vol. 9, no. 2, p. 154, Feb. 2025, doi: https://doi.org/10.3390/drones9020154 .
Z. Chu, T. Song, R. Jin, and T. Jiang, “An Experimental Evaluation Based on New Air-to-Air Multi-UAV Tracking Dataset,” 2023 IEEE International Conference on Unmanned Systems (ICUS), pp. 671–676, Oct. 2023, doi: https://doi.org/10.1109/icus58632.2023.10318461 .
Q. Zhang et al., “BRA-YOLOv10: UAV Small Target Detection Based on YOLOv10,” Drones, vol. 9, no. 3, p. 159, Feb. 2025, doi: https://doi.org/10.3390/drones9030159 .
Q. Cheng, Y. Wang, W. He, and Y. Bai, “Lightweight air-to-air unmanned aerial vehicle target detection model,” Scientific Reports, vol. 14, no. 1, p. 2609, Jan. 2024, doi: https://doi.org/10.1038/s41598-024-53181-2 .
S. Zhou et al., “A Lightweight Drone Detection Method Integrated into a Linear Attention Mechanism Based on Improved YOLOv11,” Remote Sensing, vol. 17, no. 4, p. 705, Feb. 2025, doi: https://doi.org/10.3390/rs17040705 .
V. Walter, M. Vrba, and M. Saska, “On training datasets for machine learning-based visual relative localization of micro-scale UAVs,” pp. 10674–10680, May 2020, doi: https://doi.org/10.1109/icra40945.2020.9196947 .
B. K. Isaac-Medina, M. Poyser, D. Organisciak, C. G. Willcocks, T. P. Breckon, and H. P. H. Shum, "Unmanned Aerial Vehicle Visual Detection and Tracking using Deep Neural Networks: A Performance Benchmark," in Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision Workshops (ICCVW), Montreal, QC, Canada, Oct. 2021, pp. 1223–1232. doi: 10.1109/ICCVW54120.2021.00142.
N. Jiang et al., “Anti-UAV: A Large Multi-Modal Benchmark for UAV Tracking,” arXiv.org, 2021. https://arxiv.org/abs/2101.08466 .
A. Rodriguez-Ramos, J. Rodriguez-Vazquez, C. Sampedro, and P. Campoy, “Adaptive Inattentional Framework for Video Object Detection With Reward-Conditional Training,” IEEE Access, vol. 8, pp. 124451–124466, Jan. 2020, doi: https://doi.org/10.1109/access.2020.3006191 .
A. S. Mubarak, M. Vubangsi, F. Al-Turjman, Z. S. Ameen, A. S. Mahfudh, and S. Alturjman, “Computer Vision Based Drone Detection Using Mask R-CNN,” 2022 International Conference on Artificial Intelligence in Everything (AIE), pp. 540–543, Aug. 2022, doi: https://doi.org/10.1109/aie57029.2022.00108 .
M. Ozel, Drone, “Drone Dataset,” Kaggle, [Online]. Available: https://www.kaggle.com/dasmehdixtr/drone-dataset-uav. [Accessed: Oct. 12, 2025].
R. Padilla, S. L. Netto, and E. A. da Silva, “A Survey on Performance Metrics for Object-Detection Algorithms,” in Proc. 2020 Int. Conf. Systems, Signals and Image Processing (IWSSIP), Rio de Janeiro, Brazil, Jul. 2020, pp. 237–242, doi: https://doi.org/10.1109/iwssip48289.2020.9145130.
Downloads
Published
How to Cite
Issue
Section
License
Copyright (c) 2026 Firas Mohammed Kadhum, Abbas Abdulazeez Abdulhameed, Jameelah Harbi Saud

This work is licensed under a Creative Commons Attribution-NonCommercial-NoDerivatives 4.0 International License.